Camera_Calibration_for_Multi-Modal_Robot_Vision
https://www.pirahansiah.com/farshid/portfolio/publications/Papers/Camera_Calibration_for_Multi-Modal_Robot_Vision
PDF Download My Conference Paper
Camera Calibration for Multi-Modal Robot Vision
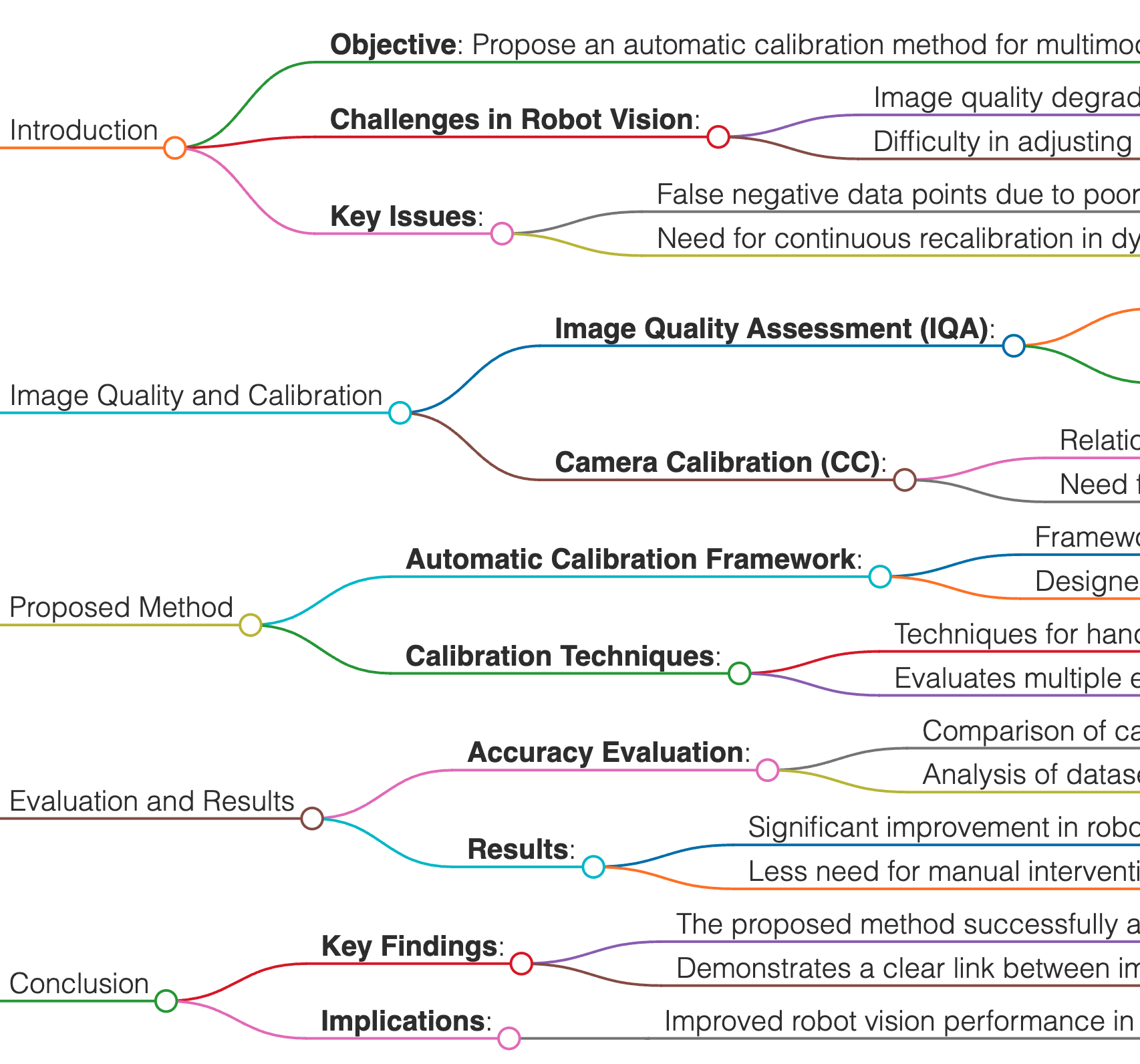
1. Introduction
- Objective: Propose an automatic calibration method for multimodal robot vision.
- Challenges in Robot Vision:
- Image quality degradation
- Difficulty in adjusting to different environments
- Key Issues:
- False negative data points due to poor calibration
- Need for continuous recalibration in dynamic environments
2. Image Quality and Calibration
- Image Quality Assessment (IQA):
- Impact of poor image quality on robot vision
- Key metrics:
- Peak Signal-to-Noise Ratio (PSNR)
- Structural Similarity Index (SSIM)
- Camera Calibration (CC):
- Relationship between image quality and calibration accuracy
- Need for automatic calibration techniques
3. Proposed Method
- Automatic Calibration Framework:
- Framework based on IQA metrics like PSNR and SSIM
- Designed to adjust calibration automatically in real-time as image quality changes
- Calibration Techniques:
- Techniques for handling dynamic environments and maintaining accuracy
- Evaluates multiple environments to test robustness
4. Evaluation and Results
- Accuracy Evaluation:
- Comparison of calibration methods in different test scenarios
- Analysis of datasets generated with automatic calibration
- Results:
- Significant improvement in robot vision accuracy using the proposed automatic calibration method
- Less need for manual intervention in real-time environments
5. Conclusion
- Key Findings:
- The proposed method successfully addresses the challenge of automatic camera calibration in dynamic environments.
- Demonstrates a clear link between image quality assessment and calibration performance.
- Implications:
- Improved robot vision performance in various applications (e.g., autonomous humanoid robots).