Camera Calibration Expertise
I am an expert in camera calibration, with several publications, applications, and solutions developed around this area. My work spans both single-camera and multi-camera systems, where I have experience with a range of calibration techniques, from simple fixed patterns (like chessboards) to more complex, automated calibration methods.
Expertise Areas:
- Standard RGB cameras: Calibration for common imaging tasks.
- High-resolution cameras: Used in industries requiring precision and high-detail imaging.
- Depth cameras: Calibration for stereo vision systems, and 3D reconstruction.
- Infrared cameras: Applied to thermal imaging, night vision, and more.
- IoT-connected camera systems: Solutions for real-time monitoring and smart environments.
- Robotic vision systems: Integrating multiple camera feeds for dynamic environments like autonomous navigation and industrial robotics.
- Medical imaging systems: Precise calibration for tools
Calibration Techniques:
- Fixed calibration patterns: Using methods like chessboards for simpler applications.
- Dynamic and automated calibration: Solutions tailored for real-time and mobile platforms, allowing cameras to adapt to changing environments.
I have worked with various industries such as robotics, IoT, medical technology, and industrial automation, providing robust calibration solutions that ensure accuracy across multiple environments and platforms.
Camera Calibration
1. Introduction
Geometric camera calibration, also referred to as camera resectioning, estimates the parameters of a lens and image sensor of an image or video camera. These parameters can be used to correct lens distortion, measure the size of an object in world units, or determine the location of the camera in the scene. Applications include:
- Machine vision for detecting and measuring objects.
- Robotics for navigation systems and 3D scene reconstruction.
2. Camera Calibration Methods
2.1 Self-Calibration Methods
Self-calibration, or auto-calibration methods, do not rely on a calibration reference object. These methods have been enhanced by using active vision, where specific camera motions, such as pure rotation or orthogonal translations, are designed to improve accuracy. However, practical application of these methods is hindered by the difficulty in achieving pure camera rotation around the optical center.
Advantages:
- No pre-processing is required.
- Useful in environments where calibration objects cannot be placed.
Disadvantages:
- Low accuracy and high complexity.
- Sensitive to noise and difficult to implement.
2.2 Active Vision-Based Calibration
Active vision calibration involves the camera performing specific movements under controlled conditions. The method allows for numerous images to be taken during controlled motion, which helps estimate the intrinsic and extrinsic parameters of the camera. The calibration based on three orthogonal translational motions is particularly useful.
Advantages:
- Medium complexity.
- Requires images of patterns in controlled environments.
Disadvantages:
- Requires additional hardware for controlled motion.
- Moderate accuracy.
2.3 Calibration with Known Object (Traditional Methods)
The most common method of camera calibration involves the use of a known object, like a chessboard, to compute the camera’s internal and external parameters. Images of the object at different orientations are taken, and transformations are applied to extract the required parameters.
Popular Methods:
- Tsai’s Method (1987): This involves a two-step calibration using known 2D patterns.
- Zhang’s Method (2000): This method uses plane images (like chessboard patterns) to compute radial distortion and other camera parameters.
Advantages:
- High accuracy with just a few calibration images.
- Widely used in libraries like OpenCV and Matlab.
Disadvantages:
- Requires prior knowledge of the calibration object and precise measurements.
3. Factors Affecting Calibration Accuracy
3.1 Image Quality
Calibration accuracy is contingent on the quality of input images. High-quality images with minimal blurring are essential for accurate camera calibration. Factors such as image sharpness, defocus, and motion blur can negatively affect calibration results.
3.2 Control Points
Camera calibration accuracy also depends on the precise location of control points in an image. Blurring, distortion, and incorrect feature extraction can lead to inaccurate results.
4. Zhang’s Camera Calibration Method
Zhang’s method is one of the most widely used techniques for camera calibration. It uses multiple images of a 2D calibration pattern (like a chessboard) to determine both the intrinsic and extrinsic parameters of the camera.
Key Steps:
- Homography Calculation: Using the Direct Linear Transformation (DLT) method, the projection matrix between the calibration target and image plane is estimated.
- Self-Calibration Techniques: These techniques are used to compute the absolute conic matrix from the images.
- Optimization: Non-linear optimization using the maximum likelihood criterion is applied to compute the final values of camera parameters.
5. Additional Methods
-
Type-2 Fuzzy-Based Camera Calibration: This method introduces the use of fuzzy logic for selecting high-quality images during the calibration process. It consists of two main steps: Auto Pre-Setting Dependent Parameters (APSDP) and Fuzzy Image Acquisition Collecting Operation (FIACO).
-
Ferstl’s Method: This method involves learning depth calibration for time-of-flight cameras using a novel calibration target where feature points are detected automatically at sub-pixel accuracy.
6. Calibration Target and Patterns
Several calibration targets can be used for camera calibration, including:
- Chessboard Patterns
- Planar Conics
- 1D Target Grids These targets serve as a reference to accurately compute the camera’s parameters.
7. Conclusion
Camera calibration is crucial for applications like 3D reconstruction, object inspection, and navigation. Proper calibration methods, such as those involving known objects, can greatly enhance the accuracy of a camera system’s measurements and improve its overall performance.
My Publications
- My Conference Papers: Camera Calibration for Multi-Modal Robot Vision
- My Conference Papers: Pattern Image Significance for Camera Calibration
<p>Camera_Calibration_for_Multi-Modal_Robot_Vision</p>
https://www.pirahansiah.com/farshid/portfolio/publications/Papers/Camera_Calibration_for_Multi-Modal_Robot_Vision
PDF Download My Conference Paper
Camera Calibration for Multi-Modal Robot Vision
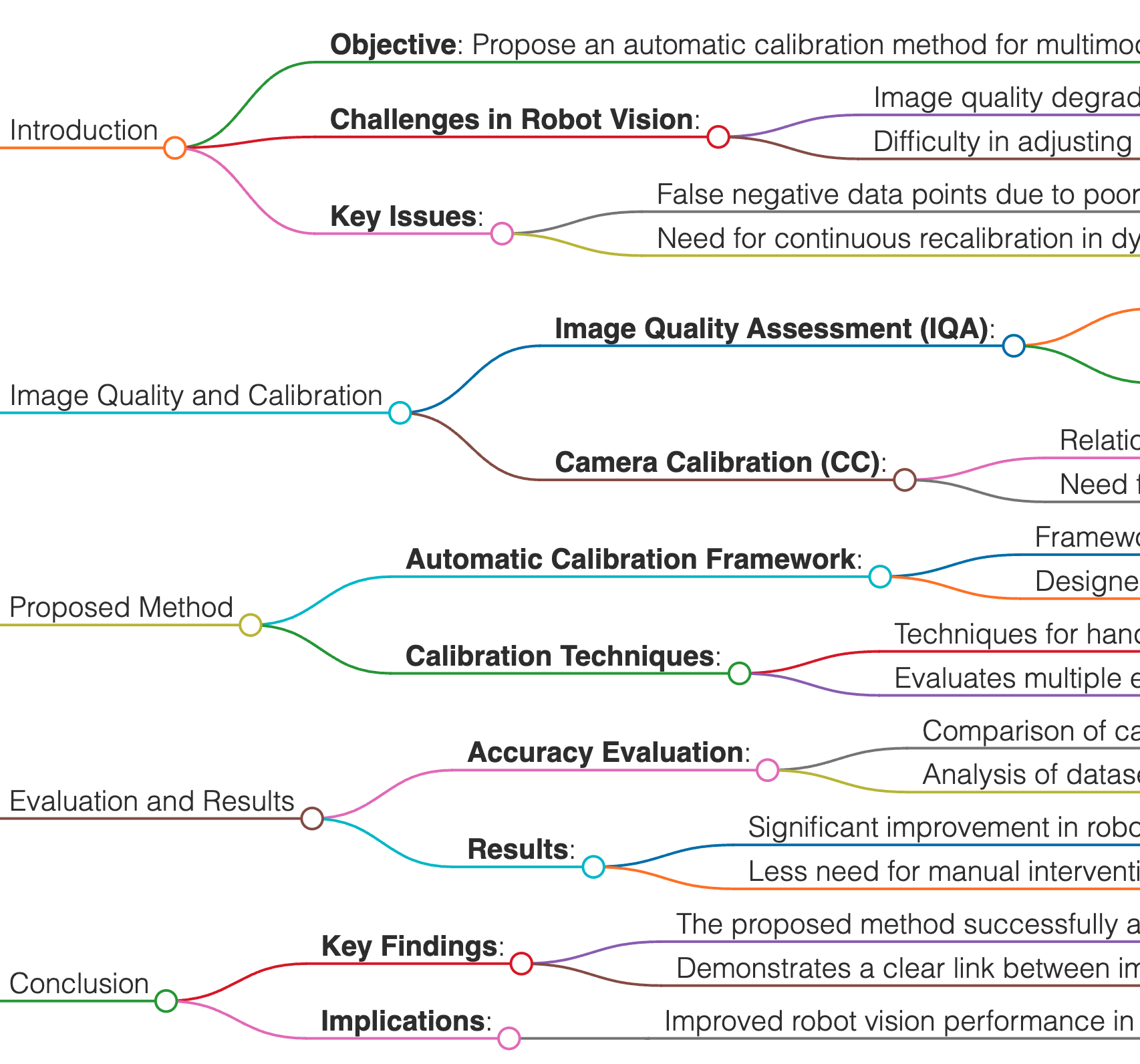
1. Introduction
- Objective: Propose an automatic calibration method for multimodal robot vision.
- Challenges in Robot Vision:
- Image quality degradation
- Difficulty in adjusting to different environments
- Key Issues:
- False negative data points due to poor calibration
- Need for continuous recalibration in dynamic environments
2. Image Quality and Calibration
- Image Quality Assessment (IQA):
- Impact of poor image quality on robot vision
- Key metrics:
- Peak Signal-to-Noise Ratio (PSNR)
- Structural Similarity Index (SSIM)
- Camera Calibration (CC):
- Relationship between image quality and calibration accuracy
- Need for automatic calibration techniques
3. Proposed Method
- Automatic Calibration Framework:
- Framework based on IQA metrics like PSNR and SSIM
- Designed to adjust calibration automatically in real-time as image quality changes
- Calibration Techniques:
- Techniques for handling dynamic environments and maintaining accuracy
- Evaluates multiple environments to test robustness
4. Evaluation and Results
- Accuracy Evaluation:
- Comparison of calibration methods in different test scenarios
- Analysis of datasets generated with automatic calibration
- Results:
- Significant improvement in robot vision accuracy using the proposed automatic calibration method
- Less need for manual intervention in real-time environments
5. Conclusion
- Key Findings:
- The proposed method successfully addresses the challenge of automatic camera calibration in dynamic environments.
- Demonstrates a clear link between image quality assessment and calibration performance.
- Implications:
- Improved robot vision performance in various applications (e.g., autonomous humanoid robots).
<p>Pattern_Image_Significance_for_Camera_Calibration</p>
https://www.pirahansiah.com/farshid/portfolio/publications/Papers/Pattern_Image_Significance_for_Camera_Calibration
PDF Download My Conference Paper
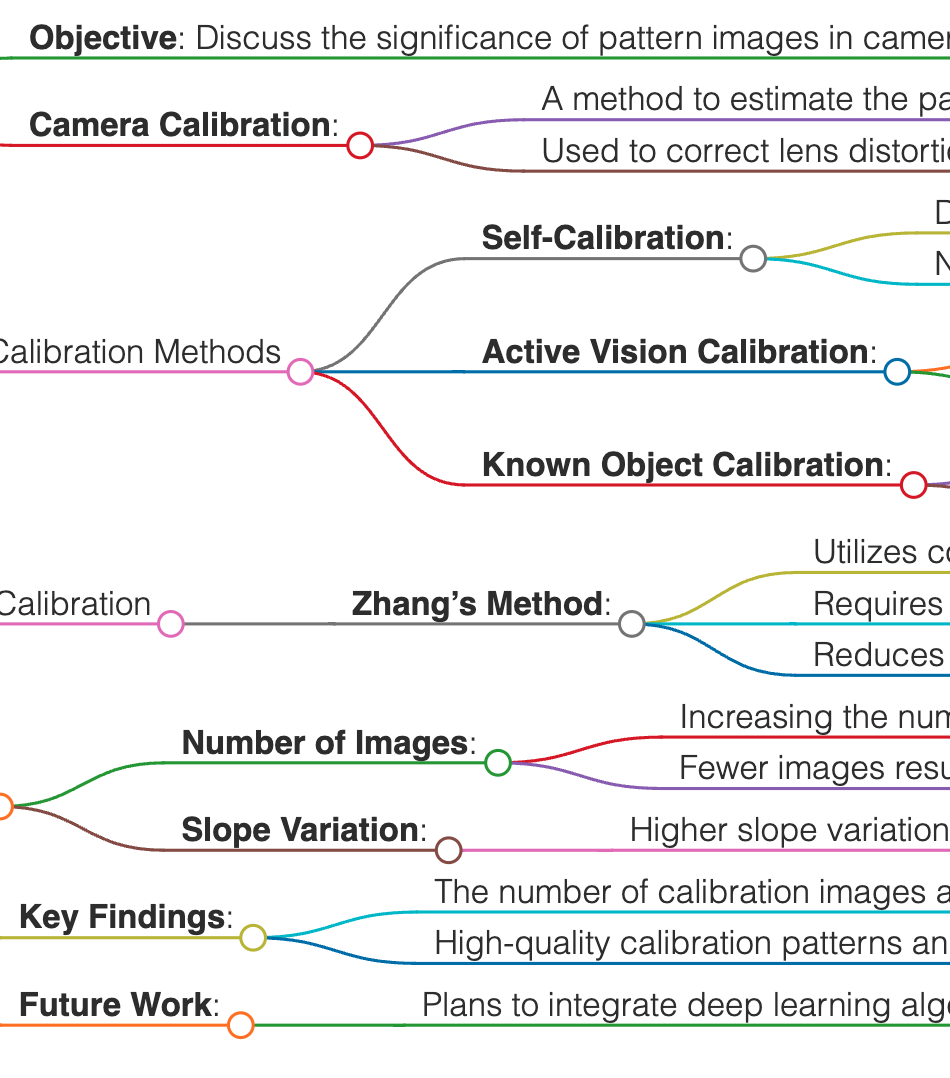
Pattern Image Significance for Camera Calibration
1. Introduction
- Objective: Discuss the significance of pattern images in camera calibration.
- Camera Calibration:
- A method to estimate the parameters of a pinhole camera model.
- Used to correct lens distortion and for 3D reconstruction in applications like machine vision, robotics, and navigation systems.
2. Categories of Camera Calibration Methods
- Self-Calibration:
- Does not rely on a known calibration object.
- Nonlinear, sensitive to noise, requires more computational power.
- Active Vision Calibration:
- Based on controlled camera motion.
- Solves parameters by using images captured during known motions.
- Known Object Calibration:
- Traditional method using calibration patterns like chessboards.
- High accuracy but requires specific knowledge of the calibration environment.
3. Algorithms for Camera Calibration
- Zhang’s Method:
- Utilizes common calibration points and self-calibration algorithms.
- Requires multiple images of a known calibration pattern from different angles.
- Reduces reprojection errors and enhances calibration accuracy.
4. Experimental Findings
- Number of Images:
- Increasing the number of calibration images improves accuracy.
- Fewer images result in higher re-projection errors.
- Slope Variation:
- Higher slope variation in calibration pattern images reduces reprojection errors.
5. Conclusion
- Key Findings:
- The number of calibration images and slope variation play a crucial role in calibration accuracy.
- High-quality calibration patterns and field of view improve calibration results.
- Future Work:
- Plans to integrate deep learning algorithms to optimize camera calibration.